I've been into radio control "seriously" since 2007. Back then I bought an RC18T, a Team Associated 1/18th scale truggy. It was a peppy, shaft driven 4wd, and oh boy did the idea of upgrading things appeal to me. Increase the power and speed and stuff started breaking. The a-arms, the gears, the out-drives, shafts, shocks, turnbuckles. I liked it really, I did, but oh boy did this not handle power that well. Even after the structure was fortified to survive powerful brushless motors, the servo and servo-saver were too weak and sloppy to keep the car pointed where you wanted it.
 |
| My old RC18T - with several mods. Aftermarket diffs, outdrives, motor, shocks, wheels turnbuckles and body. This pic is the closest to the original stock form I have. |
 |
| What it morphed into. A more reasonable motor, custom 8 cell battery pack, chunky 1/10th scale shocks, aftermarket chassis. A low profile 1/10th scale servo that acted at half of the top brace massively improved the steering. Obviously I'm bashing this around. the weight of these parts won't make this a racer. NB: wow My pictures in the past were horrible. So glad I took photography seriously. Even casual shots are more pleasing now :D |
With the RC18T, some parts were definitely better to buy than make - things where geometry was crucial like a-arms, I'd get RPM branded nylon arms. The nylon would bend on crashing. Aluminum arms would bend too, but they stay bent. You quickly learn that plastic (nylon) is definitely the material of choice for absorbing shock. Aluminum is great for precision - especially if it's static and quite chunky - e.g. gearboxes. Sometimes a chassis.
 |
| This was a custom RC18. My second car. I skipped a lot of headaches with this. The aftermarket chassis used a stiff carbon fiber upper brace that I used to create a different steering setup. I swapped the main base of the chassis for a homemade piece. The plastic I used was UHMW (ultra high molecular weight) polyethylene. It's strong and relatively easy to manipulate with just a dremel. Skipping the stock car and using a custom chassis, I was able to get the steering as I liked. Cost wise it wasn't really better or worse than buying a new one, but I didn't really have anything to mod when it was done. |
Making a car chassis can be difficult because steering geometry comes into play. Accuracy is needed. the width of a cut into plastic can set a car's geometry off. I learned quickly how easy it is to use solid axles with their built in steering geometry to create a car. With a 4-link suspension setup, the geometry can be tweaked by increasing or decreasing the length of the rods a little. Even then, there were so many options for aftermarket crawler and trail chassis, and it wasn't hard to interchange them.
 |
| One of my crawler-axle based RC cars. this one ended up with 4 wheel steer. Solid axles like these have steering built on the axle making it easy to setup. The servo goes on that green flat platform above the axle differential. The axle is held in place by 4 links. In this case it's 4 brass covered links. The shocks aren't attached to the body but can be attached just about anywhere to give the desired level of suspension travel. |
Onto the project...
I started this a couple of weeks ago. I had bought the axles online years ago, and just had them lying there begging to be used for something. I just got in mind to make a car as the last use of my scrollsaw before I upgrade it. I worked with HDPE - High Density Polyethylene. Seaboard, as hinted in the name, is commonly used in boats. It's flexible, so it will bend on serious impact. It's very easy to work with. It won't melt and fuse behind the blade cutting it. My chassis was simple. 2 side pieces using 1/2 inch HDPE, and a center skid plate using 1/4". The sides will slant inward to the front like a pizza slice to make more room for steering.


The links are 4mm threaded rod available from many hardware stores. The ends are generic aluminum rod ends. This is a 4 link setup, and those shocks are touring car shocks. The wheels had also been lying about unused, so the presence of them - and a car body too - convinced me to make a (mostly onroad) car with the solid axles. The chassis sides curve up higher than most normal crawler/scale chassis because I want the transmission and internals lower.
 |
| Quick mock-up using tape to hold the batteries in place. It ran well and felt nicely planted. Since the chassis is just some cut sheets of plastic and a set of 3mm screws, it's very cheap. The links are also cheap since they're made. The Speed controller and brushless motor on this cost $35. That price for brushless anything was unheard of when I started. |
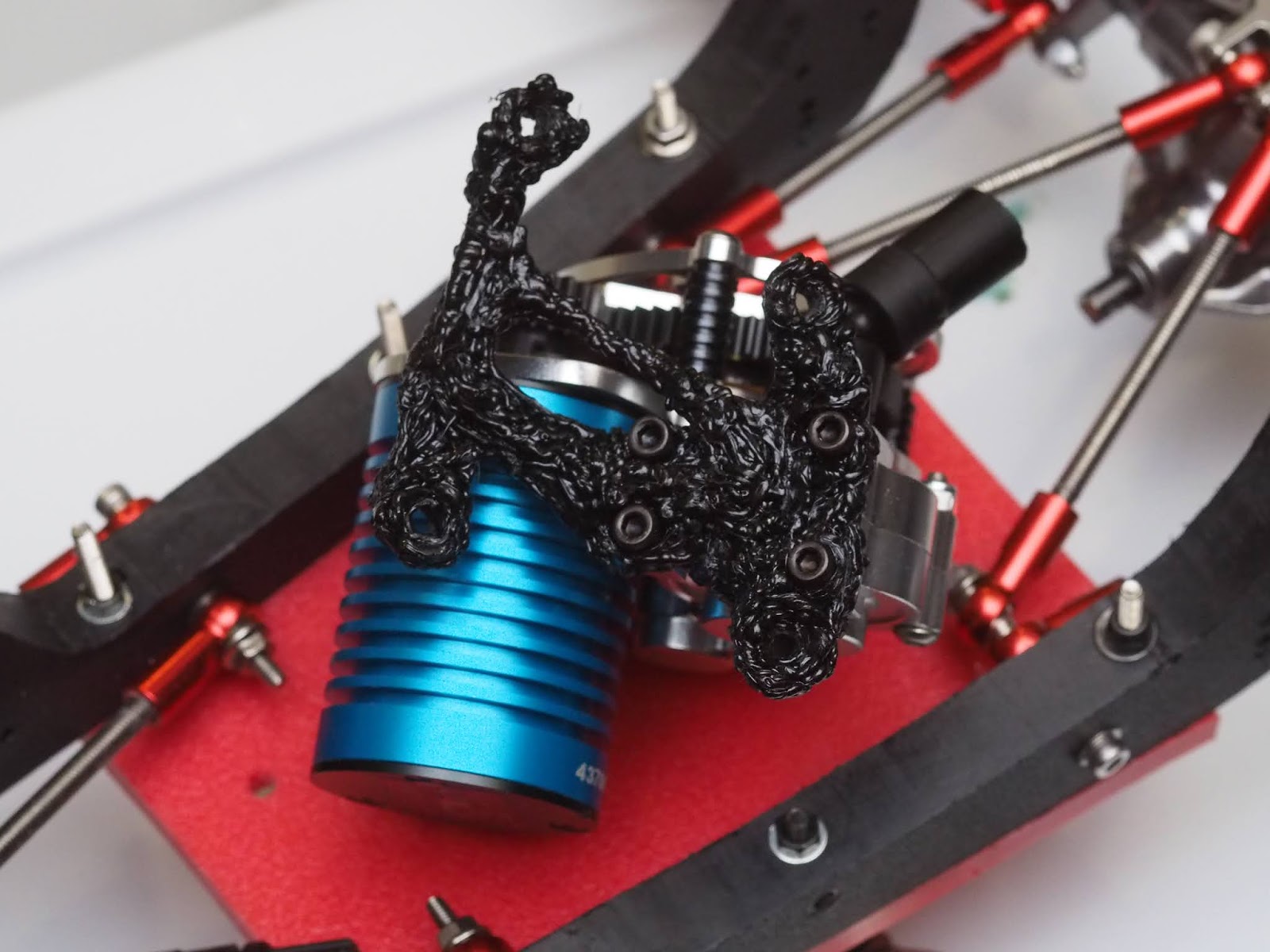
As in a previous post, the transmission is held in place using a bracket, drawn by a 3d pen, and made of PETG. This is an experiment to see how it holds up. So far so good - though I may use Kydex next time. With the transmission and driveshafts mounted, getting the car running is a lot of finishing touches. How shall I mount the body? The battery?
I wanted to experiment more with kydex - Used in a previous RC car to make a battery cover. I wanted to make a platform for the battery which curved down and around the motor, gearbox and shafts.
Finally it's time to put on body posts to mount the body. In the front I used 1/4" HDEP. I used kydex to make a hinge for the rear.
Here is is completed. The kydex in place holding 4 18650 cells. I was testing the cells in here so I ran it with a data logger. that's the black box on top the green batteries with the blue LCD.








Future ideas:
- Add mount for FPV camera. Not sure if I should make it inside or on the roof.
- Bigger tires.
- Maybe push the body back a little and give more room to the front wheels.
- I'd like to try some 21700 cells, or even 26650s. If I can do 3s1p it will be a bit easier to manage.
- Try using UHMW polyethylene again and compare to HDPE. HDPE is softer and more malleable, but I need to really put UHMW PE under some load testing again.
 |
| Never mind the comic book page I took the picture on. needed a light colored background and this was near. If Batman were driving this, it would fit :D |